4 質の高い教育をみんなに
4 質の高い教育をみんなに 10 人や国の不平等をなくそう
10 人や国の不平等をなくそう 11 住み続けられるまちづくりを
11 住み続けられるまちづくりを 14 海の豊かさを守ろう
14 海の豊かさを守ろう 15 陸の豊かさも守ろう
15 陸の豊かさも守ろう 17 パートナーシップで目標を達成しよう
17 パートナーシップで目標を達成しよう
システム制御デザイン&マネジメントプロジェクト
林業用をパワードローン・プラットフォームの研究開発計画
研究分野
複雑システムの制御
キーワード
モデルベースのシステムズエンジニアリング、宇宙システム、無人航空宇宙機
プロジェクト概要
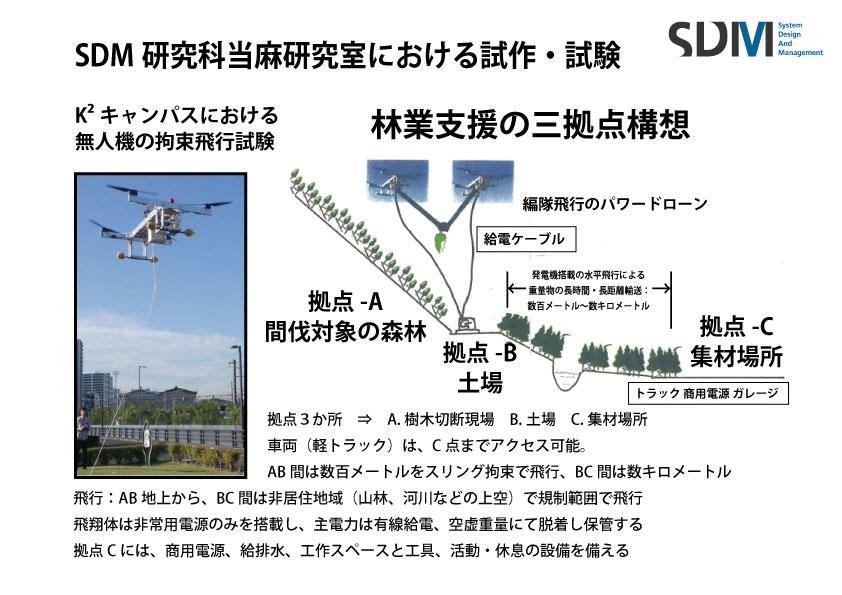
当麻研究室のK2キャンパスにおける活動 共同研究者:
名誉顧問 狼 嘉彰 SDM研究所
林業用をパワードローン・プラットフォームの研究開発計
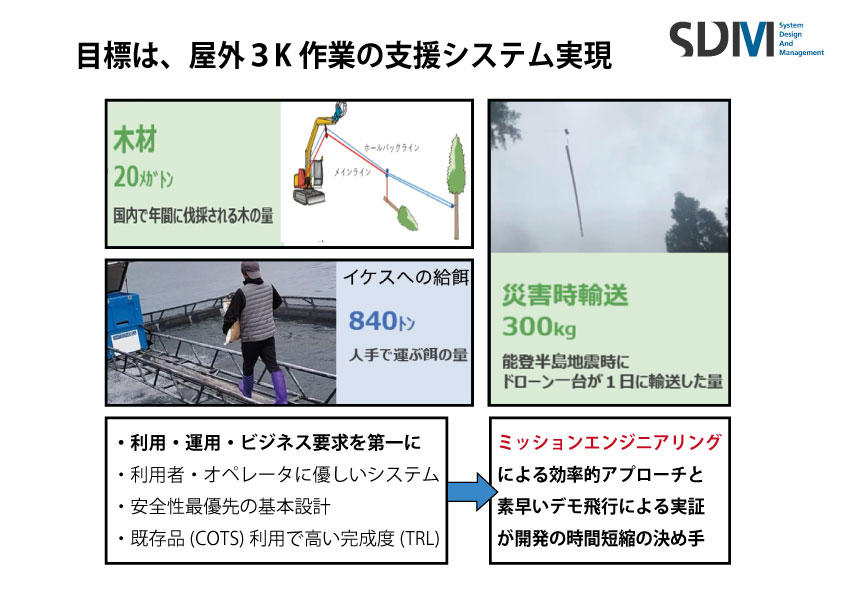
森林率70%といわれる日本の広大な森林を保全するには、過酷な屋外作業をともない、この作業負荷を軽減するために様々なアプローチが試みられています。
本研究開発は、樹木観測・機材運搬・間伐材運搬などに利用が期待されている強力な浮上力をもつドローン(以下、パワードローンと称する)の有用性を実証することを目的とし、第一段階として、法的規制の枠内で現在試作中である貨物80kg・離陸総重量150㎏のプラットフォームを林業サービス用に改修して基本要求を把握し、逐次ペイロード重量を増やし、航続距離・稼働時間を延長して実用化に近づけます。最終目標は、主翼の採用と固定方式スリング吊り下げを採用して、現場要求と推定される長さ4m・重量350㎏の木材の効率的運搬の実現を目指します。
代表的なターゲットミッション
1)軽量ペイロード・長時間運航ミッション
広大な森林の樹木を計測して得られる膨大なサンプル量データを分析して樹木の種類・高さ・年齢を測定し、CO2処理能力を推定することが急務であると言われている。このミッションを達成するには、1日10時間を超える飛行能力を有し、データ取得・一次処理用のセンサーユニットを搭載可能であることが条件となる。現時点における技術熟成度(TRL)が十分高い方式として、ハイブリッド電源を備えた中型(150㎏クラス)ドローンが候補となり、第1次試作の対象となる。
2)従来方式の間伐作業の支援
現在樹木間伐作業現場作業者は、土場から伐採を行う現場までチェーンソーなどの用具、スイングヤーダー設置用のリードロープなど50㎏を超える機材を背負って急斜面を登攀する重労働を強いられる。この運搬作業は、試作中の中型ドローンの能力範囲であるが、運用要求を精査して電源管理方式を決定する必要がある。なお、人力に依存しているリードヤーダーの張替え作業に本ドローンを利用することも可能である。
3)間伐材の運搬
間伐材ペイロードは、最大重量350㎏、寸法0.5mφ、長さ4mを伐採現場から土場まで下すことを最終ターゲットとするが、中間の長さの間伐材運搬を中間目標とする。運搬に要する飛行距離は、100mから500m程度までと想定し、電源は地上設置の電源から有線給電の併用も考慮する。運転時間 1日10時間、1日に20回往復を目標とする。主翼なしのクアッドロータ形態が適切だが、主翼の利用による動力源の負担軽減も開発目標とする。電源に対する要求が厳しい場合は、ハイブリッド方式が必要となり、主翼を利用した効率的な飛行形態も要求される。また、飛行状態・経路のモニターとコマンドのための通信システムが必須である。なお、災害復興の支援に利活用する場合は、eVTOL機能を持つ主翼付き飛行機が主となる。当面は、限定空域内で、長時間連続運転に限定する。
プロフィール

| 大学院 | システムデザイン・マネジメント研究科 |
|---|---|
| 教授 |
元・米国3M社Advanced Product Development Specialist。専門分野:ブロードバンド社会の先端コミュニケーションシステムの開発とマーケット創出。グローバル企業開発技術者として海外で豊富なプロジェクトマネジメント経験。製品の市場導入、売り上げ貢献で受賞多数。PMP (Project Management Professional)。PMI (Project Management Institute) 日本支部 研究担当理事。KPRI (慶應フォトニクス・リサーチ・インスティテュート) 副所長。2014年博士(システムデザイン・マネジメント学)学位取得。