視覚と「触る感覚」を持てば
ロボットは人のように動く
センター長 大西 公平(特任教授)
野崎 貴裕(理工学部 准教授)

人間がロボットを操作して、物体を触ったときの力や感覚をデータ化し、リアルタイムで双方向に伝送するリアルハプティクス®。2014年に設置された慶應義塾大学ハプティクス研究センターでは、当技術の普及のため国のプロジェクトや企業との積極的な共同研究開発に取り組んでいます。発明者でありセンター長を務める大西公平特任教授、社会実装などの研究を進めている野崎貴裕准教授にお話を伺いました。
人間の五感のひとつ「触覚」をリアルに伝送する技術
Q まず、「リアルハプティクス」がどのような技術なのかを教えてください。
大西:人間の五感のうち、聴覚や視覚は電話やテレビを通じて伝送できますよね。リアルハプティクスは、「触覚」を伝送する技術です。触る感覚をデジタルデータとして記録し、ネットワーク伝送することで、遠くの人間に伝えることができるのです。
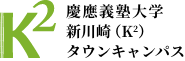
言葉だけではイメージが難しいので、デモ機で体験してみましょう。上側のフォロワ(子機)の末端の感覚を、下側のリーダ(親機)で同じように感じることができます。フォロワに鉄を掴ませると「硬い」、スポンジを掴ませると「ふわふわ」という感覚が、リーダ側にリアルに伝わっています。
リーダとフォロワは、遠隔通信できます。例えば、遠い工事現場でロボットが掴んだ物質の感触を、東京のオフィス内でリアルに感じて、まるで現場にいるかのようにコントロールすることができます。
Q 「力触覚」を伝えることが、ロボットにとってなぜ重要なのでしょうか。
大西:もう一度、デモ機で実験してみましょう。まずリアルハプティクス(力触覚)がある状態でリーダを操作して、ポテトチップスを掴んでみてください。簡単にできますよね。次にリアルハプティクスがない状態で、目で見ながら慎重に掴んでみましょう。割れてしまいました。わずかながら、力を入れ過ぎてしまったようですね。
実際にやってみると分かるのですが、人間の動作は、視覚・聴覚だけだと繊細な力加減が困難です。私たちは、指先の感覚や腕に感じる重みを無意識的に判断しながら、柔らかい食品を扱う、動物を抱っこするなど人間ならではの動作をしています。これが、医療・介護や生活支援の現場でロボットを実用化するために、リアルハプティクスが不可欠である理由です。
Q 「人間同様の動き」だけでなく、「人間以上の動き」も可能ですか。
大西:音声や画像を拡大・縮小できるのと同じように、リアルハプティクスで感知した力触覚も拡大・縮小ができます。拡大すれば、人間の手の力で重い物体を持ち上げられます。逆に縮小すれば、今まで不可能だったミクロの世界の繊細な作業が可能です。
応用が期待されている分野に、マイクロサージャリー(微小外科)があります。顕微鏡の拡大画像を見ながら感覚を拡大し、動作を縮小すれば、毛細血管も吻合(ルビ:ふんごう)することができます。卵子などを扱う生殖医療の現場でも役に立つでしょう。
外科医師の要請で生まれた
リアルハプティクス
産業や生活支援など、
さまざまな分野に
応用できるシーズ技術に

Q リアルハプティクスが誕生した経緯を教えてください。
大西:2002年に、慶應義塾大学医学部から「手術用ロボットの指先に、力触覚をつけたい」と依頼をされたことがきっかけです。当時はアメリカで外科手術支援ロボット「ダヴィンチ」が誕生し、さらに内視鏡による遠隔手術が普及し始めた時期ですが、実は指先の感覚がない状態で手術をすることは避けたいという話でした。
ロボットが触れた感覚を正確に外科医の指先に伝え、同時に外科医が指先に込めた力をロボットがそのまま再現する、という要望に応えてハプティクス鉗子を開発したことが、研究のスタート地点です。
Q 医療分野での応用が期待されるリアルハプティクスですが、実際に応用した例を教えてください。
大西:慶應義塾大学医学部、横浜国立大学、神奈川県立産業技術総合研究所と、モーションリブ株式会社との共同研究で、リアルハプティクス技術を応用した脊椎手術用ドリル「ハプティクスドリル」を開発しました。
傷つきやすい脊髄神経や脈管系の近くで、硬い骨をドリルで削る手術は、非常に難度の高い手技が求められます。わずかなミスも許されないため、術者には極度のストレスがかかります。
そこで、骨ドリルにリアルハプティクス技術を実装しました。ドリルが骨を貫通した瞬間の手応えをドリル自体がすばやく感じ取り、瞬時に自動停止します。整形外科医の皆様の協力を得て動物実験で試したところ、貫通検知から停止までにドリルが進む距離は、マニュアルで操作する通常の骨ドリルの約10分の1以下という結果を得ました。ハプティクスドリルを使用することで、経験の浅い術者でも正確で安全な手術が可能になります。
Q 世界的にみると、力触覚を伝送する研究は1940年ごろから始まっていたようですが、どのように成功させたのでしょうか。
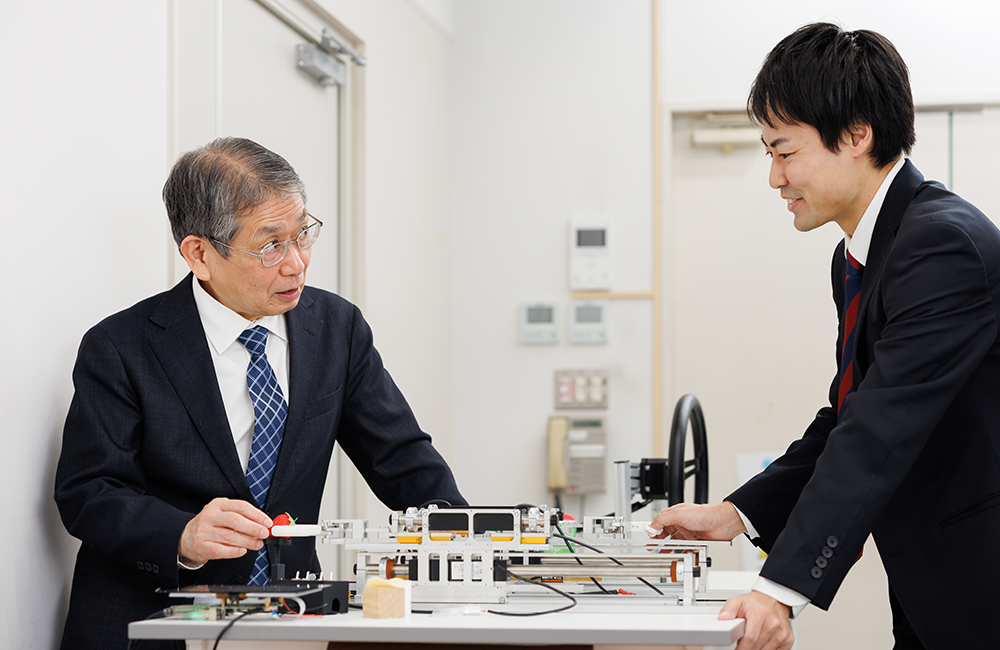
大西:力触覚を伝送する仕組みは、作用反作用則(fs+fm=0)と追従性(vs-vm=0)という2式の実現が必要なのですが、この2式を同時に満足させることは不可能です。しかし、タイミングをわずかにずらせば事実上成立させることができます。そこで私たちは、二つの式にわざと1000分の1秒程度の時間差をつけることで、力触覚伝送をリアルハプティクス技術として完成させました。また力センサーを用いずとも、実際に触っているのと変わらない感覚を伝える点にもこの技術のユニークさがあります。
さらにリアルハプティクスの技術はさまざまな産業分野で活用できると考え、アプリケーションパッケージとして社会に提供するシステムを構築しました。具体的にはリアルハプティクスの技術をAbcCore®というICチップに搭載し、機械への実装を容易にしたのです。現在では、慶應義塾大学発のベンチャー企業「モーションリブ株式会社」がAbcCore®の製造販売や企業サポートを行い、すでに80社ほどの企業に提供しています。
山岳トンネル掘削作業現場で
手作業が基本だった
火薬装填を遠隔化

Q 産業分野では(株)大林組などとリアルハプティクスの研究を行なっていますが、どのような現場で実装されていますか。
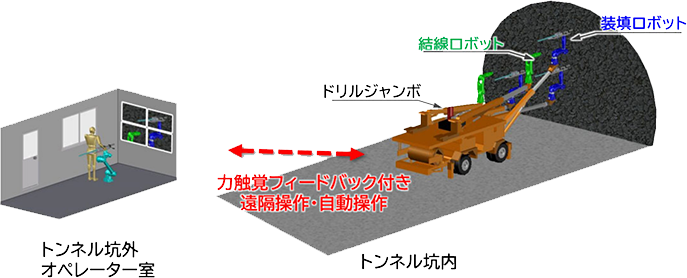
野崎:例えば山岳トンネルの掘削。これにはトンネル先端(切羽)に爆薬を装填する必要があります。ところが山の中は不安定な現場なので、落石や崩落による重大事故が起こりやすい。
山岳トンネル工事のうち、重機を使用する支保工建て込みなどの作業は、遠隔化・自動化が進んでいます。しかし、爆薬の装填工程に関しては依然として手作業が基本となっていました。現場によって穴の位置や数、壁面の硬さや凹凸といった条件が異なり、爆薬を穴に押し込むためには繊細な力加減が求められるためです。
そこで、リアルハプティクスを搭載した装填ロボットを、トンネル坑外のオペレーター室から操作するシステムを開発しました。安全な場所で、爆薬を棒で押し込むときの力加減・手応えを感じながら、あたかも現場にいるような感覚で作業ができます。
Q 爆薬装填作業の自動化による恩恵を教えてください。
野崎:一番のメリットは、人命に関わるリスクを回避できること。今は遠隔操作ですが、リアルハプティクスでは動作データを記録・再現できるので、いずれオペレーターなしで自動運転が可能です。トンネル工事を1メートル進めるためには100~200個の穴に爆薬を込める作業が必要ですが、装填ロボットが高速で動作を再現することで、工期の短縮にもつながります。
Q 民間企業と共同研究をすることには、どのような意義がありますか。
野崎:大西先生から教えていただいたことですが、真理を発見する理学(Science)に対し、工学(Technology)は価値を創る学問です。誰かを喜ばせることが工学の最終ゴールだと考えているので、社会実装に貢献できることは、研究者として本望です。
一緒に開発を行っているパートナー企業の方の情熱に触発されることもあります。例えば建設業界では、関係者が不慮の事故にあわれるという経験をした方もいらっしゃいました。「事故をなくしたい」という切実な思いを受け取ることで、より早く、より確実な研究成果を出す原動力になります。
少子高齢化の解決技術は
世界的ニーズが高い
Q リアルハプティクスについて、今後どのような企業との共同研究を望んでいますか。
大西:日本社会で少子高齢化が進むことは間違いありません。地方へ行くと、地域産業を支えている働き手がほぼ70代以上ということも珍しくなく、このままでは地域全体が衰退するのではと危惧しています。リアルハプティクスを使って熟練作業者や腕に覚えのある職人さん達の巧みな動作をデータ化して、それをロボットによって再現すれば、手作業を自動化できます。手作業など人手に頼る作業が多い中小企業、地方企業にこそ、私たちの技術を役立てたいと考えています。
さらにリアルハプティクスによって取得した熟練作業などの動作データと日本中の研究所、企業が持つノウハウやデータを統合していけば、人間と同じように作業して働くロボットを完成させることができます。IoA(Internet of Actions)と私たちは提唱していますが、クラウドに動作データやノウハウなどを蓄えて皆で活用していくことで、産業だけでなく介護・看護の分野でもロボットの活躍が期待できます。
少子高齢化の問題は、どの国もいずれ直面します。少ない人数で産業競争力を強化して国を豊かにするとともに、介護・看護ロボットを含むサービスロボットを充実させることで、日本のみならず世界を幸福にできるのではないでしょうか。
Q 一家に一台ロボットがいる、そんな未来が近づいているのでしょうか。
大西:日本の人口が1億人を下回る2050年以降には、約3千万台のロボットが必要になると予測しています。3千万台というのは、国内を走る軽自動車の数と同程度なので、もはや珍しい存在ではなくなっていくのだろうと思います。
野崎:私は、社会の中に「さりげなく人間を支えるロボット」がいる未来が良いのではと考えています。例えば、介護を受ける方はやっぱり人間と一緒に居たいのではないでしょうか。介護ロボットが全面的に人間の代わりをするのではなくて、別室でタオルを畳む、汚物を処理するなど、後方で支援するべきなのかもしれません。
大西:人とロボットが一緒に生活する未来を想定しながら、みんなで社会のシステムを考えるべき時期なのかもしれないですね。
研究以外のエピソード

クラリネットを演奏する大西先生。オーケストラのクラリネット奏者の出身国を当てることができるそうです。「演奏者の言語によって音が違うんですよ。例えば子音が強いチェコなどの奏者は、はっきりとした音、日本やイタリアなど母音が強い国の奏者はまろやかな音を出します」とこぼれ話を披露してくださいました。
野崎先生は、休日は二人の男の子のお父さんとして奮闘中です。お子さんの今のブームは空き箱工作とのこと。「研究で忙しい毎日ですが、子どもと遊ぶこと、おいしいものを食べることが楽しみです。甲殻類がとくに好きですね」と素顔を見せてくださいました。
プロフィール
1985年電気学会論文賞、1996年精密工学会賞、2004年IEEE Dr.-Ing Eugine Mittlemann Achievement Award、2012年福澤賞、2016年紫綬褒章、2017年電気学会功績賞、2019年藤原賞、2023年ヒロセ賞などを受賞。現在、IEEE Life Fellow、電気学会名誉員など。主な著作に、"Motion Control Systems" (Wiley)、「「リアル」を掴む!」(東京電機大学出版局)など。
2010年3月 慶應義塾大学 理工学部 システムデザイン工学科 卒業
2012年3月 慶應義塾大学大学院理工学研究科前期博士課程修了、修士号取得、正代表
2014年3月 慶應義塾大学大学院理工学研究科後期博士課程早期修了 博士(工学)取得
2012年4月~2014年3月 日本学術振興会 特別研究員(DC1)
2014年4月~2015年3月 横浜国立大学大学院工学研究院 研究教員
2015年4月~2018年3月 慶應義塾大学理工学部システムデザイン工学科 助教
2018年4月~2022年3月 慶應義塾大学理工学部システムデザイン工学科 専任講師
2019年10月~2021年4月 マサチューセッツ工科大学 機械工学科 客員研究員
2022年4月~現在 慶應義塾大学理工学部システムデザイン工学科 准教授
2022年4月~現在 慶應義塾大学大学院医学研究科 研究生
2023年4月~現在 神奈川歯科大学 特任准教授