4 質の高い教育をみんなに
4 質の高い教育をみんなに 10 人や国の不平等をなくそう
10 人や国の不平等をなくそう 11 住み続けられるまちづくりを
11 住み続けられるまちづくりを 14 海の豊かさを守ろう
14 海の豊かさを守ろう 15 陸の豊かさも守ろう
15 陸の豊かさも守ろう 17 パートナーシップで目標を達成しよう
17 パートナーシップで目標を達成しよう
システム制御デザイン&マネジメントプロジェクト
複雑システムの制御を成功裏に実現するアプローチと手段
研究分野
複雑システムの制御
キーワード
モデルベースのシステムズエンジニアリング、宇宙システム、無人航空宇宙機
プロジェクト概要
神武研究室のK2キャンパスにおける活動 共同研究者:名誉顧問 狼 嘉彰 SDM研究所 システムデザインとインテグレーション、先端計測制御
神武研究室では、制御システム・デザインの手法を現実に課題となっている様々な課題を解決に導くための社会展開を目指しています。今年度は、離島に物資を届けるための自律型無人航空機、泥濘地や水没部分を歩行して作業する遠隔操作型歩行ロボットの2テーマを推進すると同時に、人工衛星の複雑な運動分析手法を応用してヒトの筋骨格系を工学的に扱い不具合の同定と機能回復の研究を推進しております。システムズエンジニアリングの基本『始める前に終わりを考える(ダビンチ)』を守りつつタイミングよく実現すべく努力を重ねております。以下に具体例を示します。
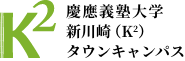
無人機の飛行試験

離島サービス用自律型無人機構想図

フェリーや貨物船によるサービスを補完
- 欠航等や少ない便数による物資の不足を補う
- 鮮度を必要とする物資を輸送する
- 物流コストを下げて島民生活を活発化する
- 船長・船員の高齢化を補う若手を育成する
泥濘地歩行出来る屋外作業ロボット

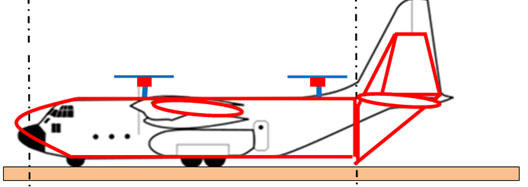
筋骨格系の矯正法SBRT
希望する共同研究
- 離島へのカーゴ輸送
- 外作業ロボット
- 筋骨格系セラピーの統合的アプローチ
プロフィール

| 大学院 | システムデザイン・マネジメント研究科 |
|---|---|
| 教授 |
慶應義塾大学大学院理工学研究科修了後、宇宙開発事業団入社。H-IIAロケットの研究開発と打上げに従事。欧州宇宙機関(ESA)研究員を経て、宇宙航空研究開発機構主任開発員。国際宇宙ステーションや人工衛星に搭載するソフトウェアの独立検証・有効性確認の統括および宇宙機搭載ソフトウェアに関するアメリカ航空宇宙局(NASA)、ESAとの国際連携に従事。慶應義塾大学先導研究センター准教授を経て、2011年度より同大学院システムデザイン・マネジメント研究科准教授。2018年度より同教授。IMES(屋内GPS)コンソーシアム代表幹事、日本スポーツ振興センターハイパフォーマンス戦略部アドバイザーなどを歴任。Multi-GNSS Asia 運営委員、米国PMI PMP。Asia Institute of Technology, Adjunct Professor, 博士(政策・メディア)。