9 産業と技術革新の基盤を作ろう
9 産業と技術革新の基盤を作ろう 12 つくる責任、つかう責任
12 つくる責任、つかう責任
エラーフリーPOFによる革新的通信システムの開発
Beyond 5Gに向けた分散MEC環境の構築
研究分野
計算機 / 通信 / 並列分散処理 / リアルタイムシステム
キーワード
Beyond 5G / コーデック / FPGA / ASIC / AIアプリケーション
プロジェクト概要
本研究は、エラーフリーPOF(Plastic Optical Fiber)を用いて、従来の通信システムにおける誤り訂正機能や波形整形回路を不要とし、通信システムの発熱、遅延、コストの問題を一気に解決することを目指しています。
2021年プレスリリースされたエラーフリーPOFによって、FEC(Forward Error Correction)に代表される誤り訂正機能が不要となり、低消費電力、低遅延、低コストを達成する新たなBeyond 5Gシステムが実現可能となりました。しかし、FECなしのエラーフリーPOF伝送システム技術は未開発状態であり、早急な課題解決が求められています。本研究の最終目標として、エラーフリーPOF (Plastic Optical Fiber)を用いて、多値変調方式による1レーンあたり50 Gbps級のデータ通信を誤り訂正を行わずに実現する通信技術の確立を目指しています。さらに、エラーフリーPOFの一括成型による多心化技術を確立し、既存の誤り訂正方式を採用した通信システムとの性能比較を行い、信頼性、転送性能、消費電力、通信遅延等の点において、エラーフリーPOF伝送システムが優れていることの実証も目標としています。
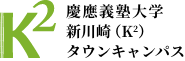
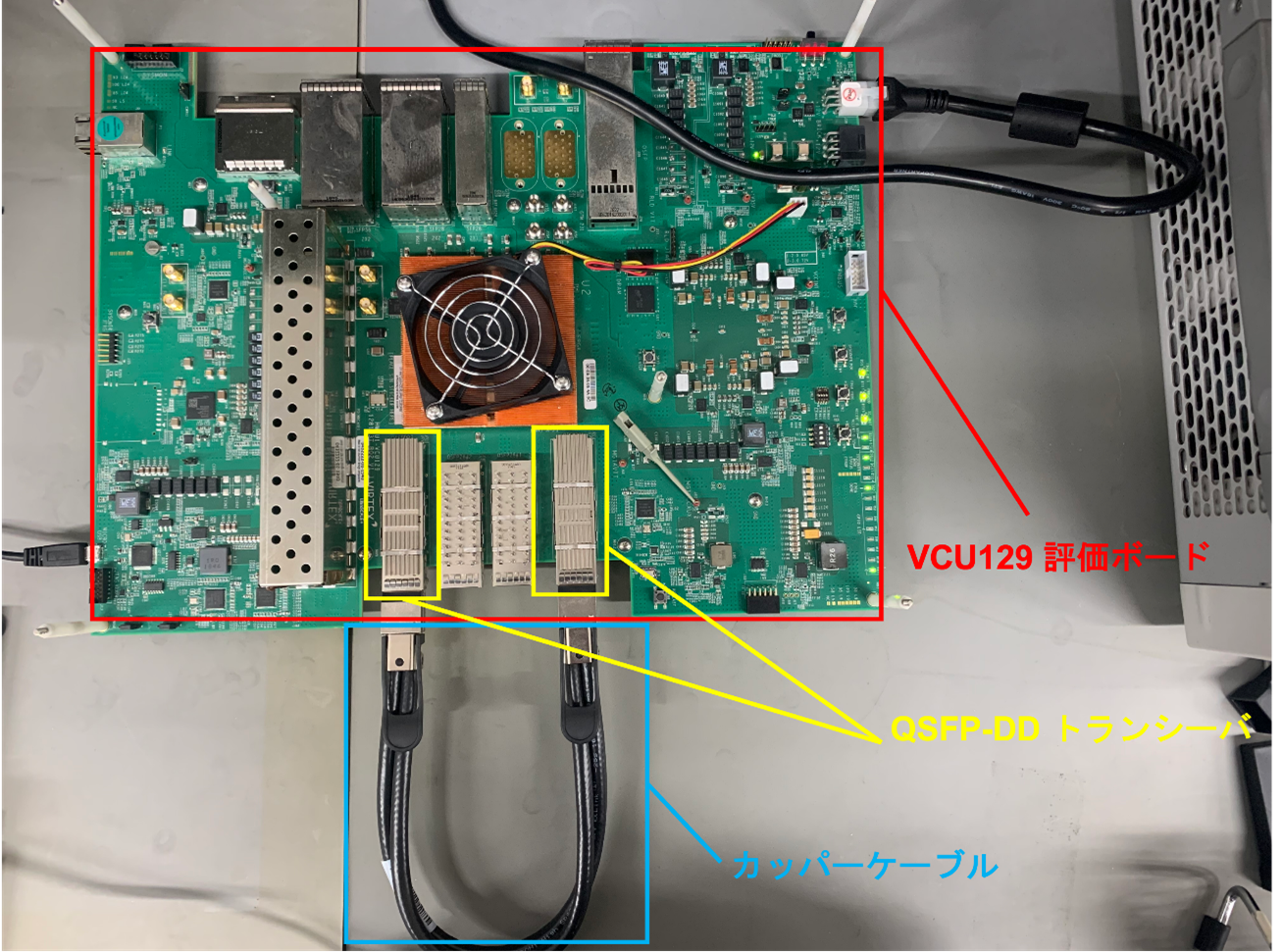
このような目標のもと、現状ではBeyond 5Gに向けた分散MEC (Multi-Access Edge Computing)環境として、エラーフリーPOF用ネットワークチップの設計および検証を行っています。具体的には、エラーフリーPOF検証用に誤り訂正・検出を制御可能なネットワークチップの設計・検証を行い、エラーフリーPOFによる消費電力・通信遅延の削減を検証しています。ネットワークチップではEthernet互換codecと、エラーフリーPOFの性能を最大限に発揮する新規設計のcodecを選択可能にし、また誤り検出機能や訂正機能の有無を自由に設定可能にすることで多様な検証を可能にしています。また搭載するエラーフリーPOF用codecの試作も行っています。
希望する共同研究
- リアルタイム処理用プロセッサ
- 分散制御コントローラ
- NoCアーキテクチャ
連携のイメージ
- 宇宙機・ロボット制御用I/O処理
- リアルタイム処理プロセシングユニット(コンテキストキャッシュ)
- 光ケーブル
連携実績
- 宇宙機・ロボット制御用I/O処理
- IO制御用プロセッサ(NVIOC)
- リアルタイム通信規格(Responsive Link)
プロフィール

| 学科: | 情報工学科 |
|---|---|
| 専攻: | 開放環境科学専攻 |
| 職名: | 教授 |
1996年 慶應義塾大学大学院理工学研究科博士課程修了
1996年~1998年 通商産業省 工業技術院 電子技術総合研究所 研究員
1997年~2000年 科学技術振興事業団 さきがけ研究21 研究員
1998年~2000年 慶應義塾大学理工学部 助手
1998年~2002年 電子技術総合研究所 COE特別研究員
2000年~2004年 慶應義塾大学理工学部 専任講師
2002年~ (独)産業技術総合研究所デジタルヒューマン研究センター 客員研究員
2004年~2013年 慶應義塾大学理工学部 助教授
2013年4月~ 慶応義塾大学理工学部 教授