慶應義塾大学 ハプティクス研究センター特設ページ

News Scrap
- CEATEC 2021 ONLINE(シーテック 2021 オンライン)に出展いたします。
2021年10月19日(火)~22日(金) - 2021年 7月2日(金)13:30-16:00
JST未来社会創造事業 超スマート社会の実現領域 本格研究キックオフシンポジウム
製造業に革新をもたらすスマートロボット技術
https://www.k2.keio.ac.jp/press/hrc_symposium20210702.html - 2021年 3月30日(火)日経BP
未来コトハジメ(ミラコト)
ロボティクス社会 ロボットは卵をつぶさずに掴めるか? 力加減を触覚技術で数値化して制御 - 2021年3月25日 日刊工業新聞
遠隔左官作業再現/大林組・慶大 厚さ1mm以下の精度 - 2021年3月25日 建設通信新聞(プレスリリース)
遠隔ロボで左官作業再現/大林組・慶応大 リアルハプティクス/厚さ1mm以下の精度実現 - 第11回IEICE ICT Pioneers Webinar での講演
【開催日時】2021年5月18日(火)13:30~15:00《聴講無料》
【主催】(一社)電子情報通信学会サービス委員会
【講演者】大西 公平(慶應義塾大学 特任教授 / ハプティクス研究センター センター長)
https://www.ieice.org/jpn_r/event/webinar/20210518.html
《プレスリリース》
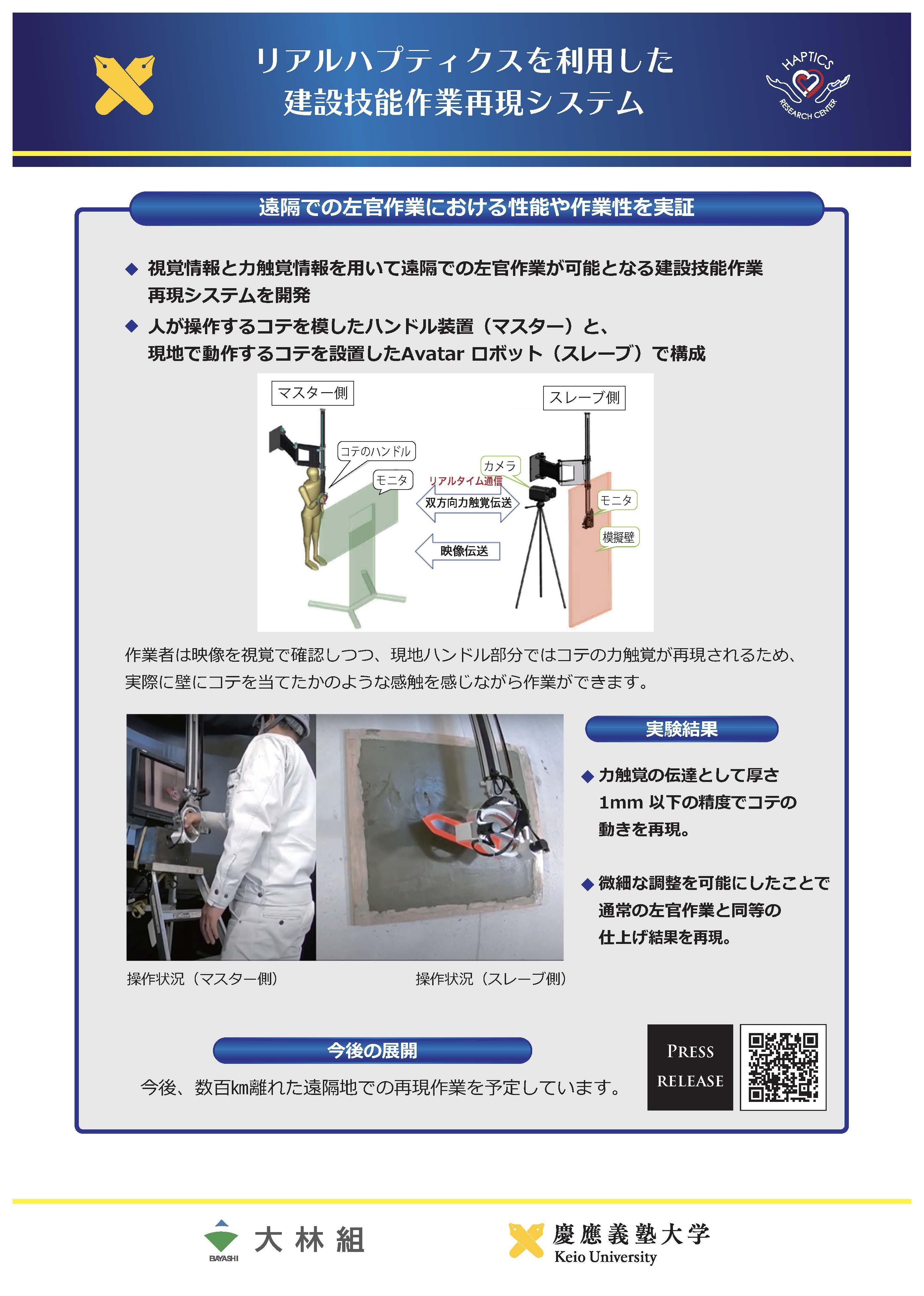
リアルハプティクスを利用した建設技能作業再現システムを開発(2021/03/24)
-遠隔での左官作業における性能や作業性を実証-
株式会社大林組(本社:東京都港区、社長:蓮輪賢治)と慶應義塾大学 グローバルリサーチインスティテュートハプティクス研究センター(センター長:村上俊之《理工学部教授》、野崎貴裕《理工学部専任講師》)は共同で、力触覚を再現する技術「リアルハプティクス」を適用することで、左官作業における手の動きや力、力触覚を再現可能な建設技能作業再現システムを開発しました。
https://youtu.be/1YsfGrjM6C8
株式会社大林組
慶應義塾大学グローバルリサーチインスティテュート ハプティクス研究センター
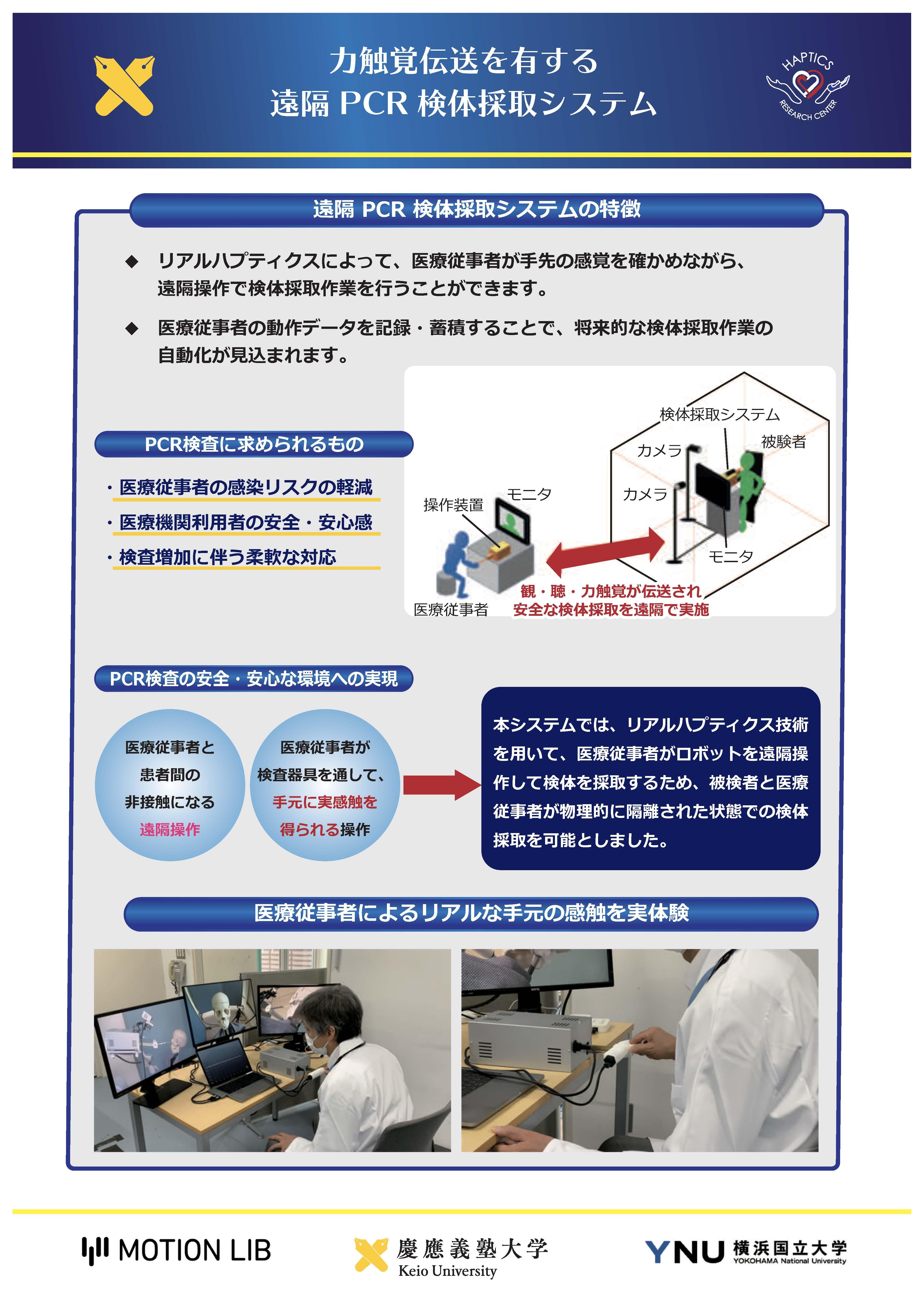
リアルハプティクスによる力触覚伝送を有する遠隔PCR検体採取システム(2020/09/10)
リアルハプティクスによる力触覚伝送機能を有する、非対面でPCR検体採取を可能とする遠隔操作システムを開発し、医師と共に技術の基礎検証を行いました。
https://youtu.be/yhS4OR5C3nY
慶應義塾大学グローバルリサーチインスティテュート ハプティクス研究センター
K2発ベンチャー モーションリブ株式会社
国立大学法人横浜国立大学
リアルハプティクスとMR(複合現実)技術を用いた、 袋状食品包装の空気漏れ検査システム開発に成功(2021/06/18)
株式会社情報システムエンジニアリング(本社:東京都新宿区、代表取締役社長:黒田聡)は、慶應義塾大学 グローバルリサーチインスティテュート ハプティクス研究センター、モーションリブ株式会社(本社:神奈川県川崎市、代表取締役CEO:溝口貴弘)と共同で、リアルハプティクスとMR(複合現実)技術を組み合わせた袋状食品包装の空気漏れ検査システムの開発に成功しました。これにより、大型設備を導入することなく、従来作業者の感覚・経験のみに依存していた検査の精度を向上することが可能となります。
https://www.youtube.com/watch?v=r4RvEM8xYlM
株式会社情報システムエンジニアリング
慶應義塾大学
モーションリブ株式会社
リアルハプティクス 技術紹介動画
-
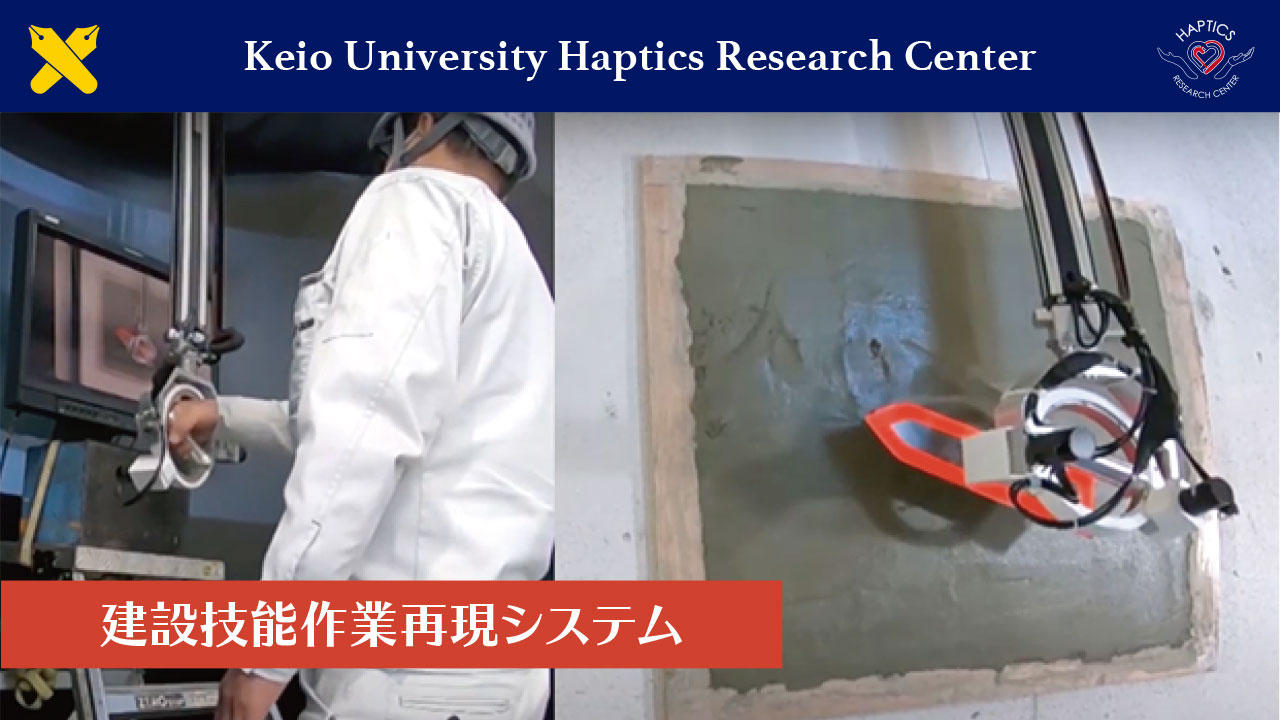
大林組/慶應義塾大学 建設技能作業再現システム力触覚を再現する技術「リアルハプティクス」を適用することで、左官作業における手の動きや力、力触覚を再現可能な建設技能作業再現システムを開発しました。このシステムは、人が操作するコテを模したハンドル装置(マスター)と、現地で動作するコテを設置したAvatarロボット(スレーブ)で構成されています。
-
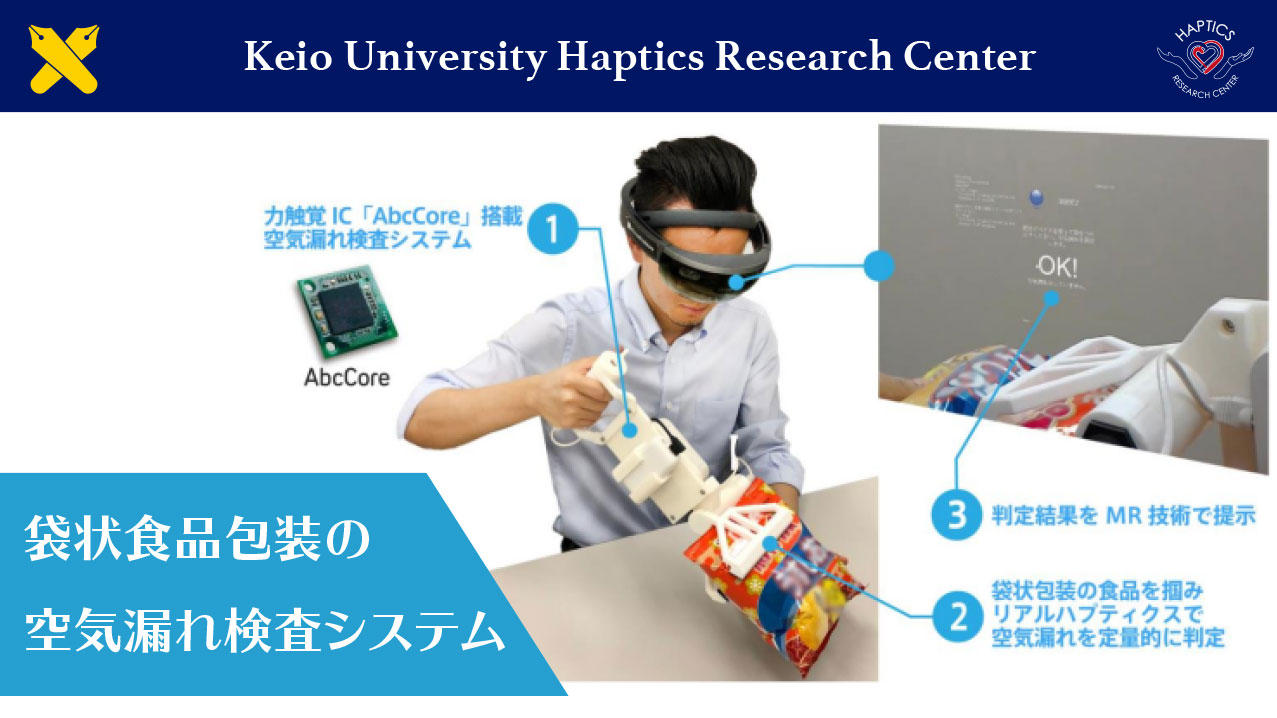
株式会社 情報システムエンジニアリング/モーションリブ株式会社/慶應義塾大学 袋状食品包装空気漏れ検査システムリアルハプティクスとMR(複合現実)技術を組み合わせた袋状食品包装の空気漏れ検査システムです。リアルハプティクスにより力触覚を数値化することで空気漏れを定量的に評価すると同時に、MR 技術を利用して作業者が装着するホロレンズに検査結果を表示することで、従来の作業工程を大きく変えることなく作業者の熟練度やモチベーションに影響されない的確な作業を実現しました。
-

慶應義塾大学ハプティクス研究センター サイバーバイクリアルハプティクス技術の応用により、遠隔で行為・感触がスケール自在で伝わり、あたかも自分が遠く離れた場所にいるかのような感覚を得ることができます。本装置では、バイクから電車を走らせ、線路の傾斜や路面環境が伝わる凜場間ある走りでプチ旅行体験できます。
-
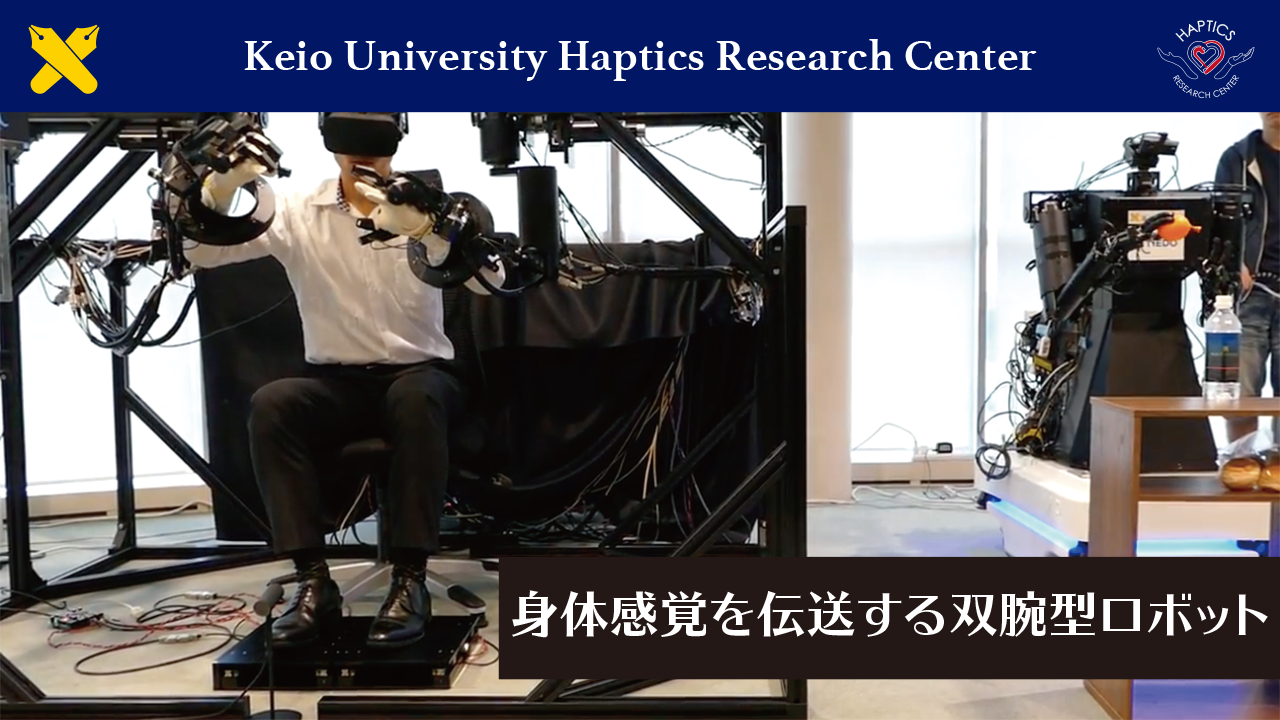
慶應義塾大学ハプティクス研究センター 身体感覚を伝送する双腕型ロボット少子高齢化を背景に、ロボットによる作業支援が期待されています。世界初の高精度力触覚技術を活用することで、人間同様に器用で巧みな動作を実現可能な双腕型ロボットを開発することに成功しました。
-
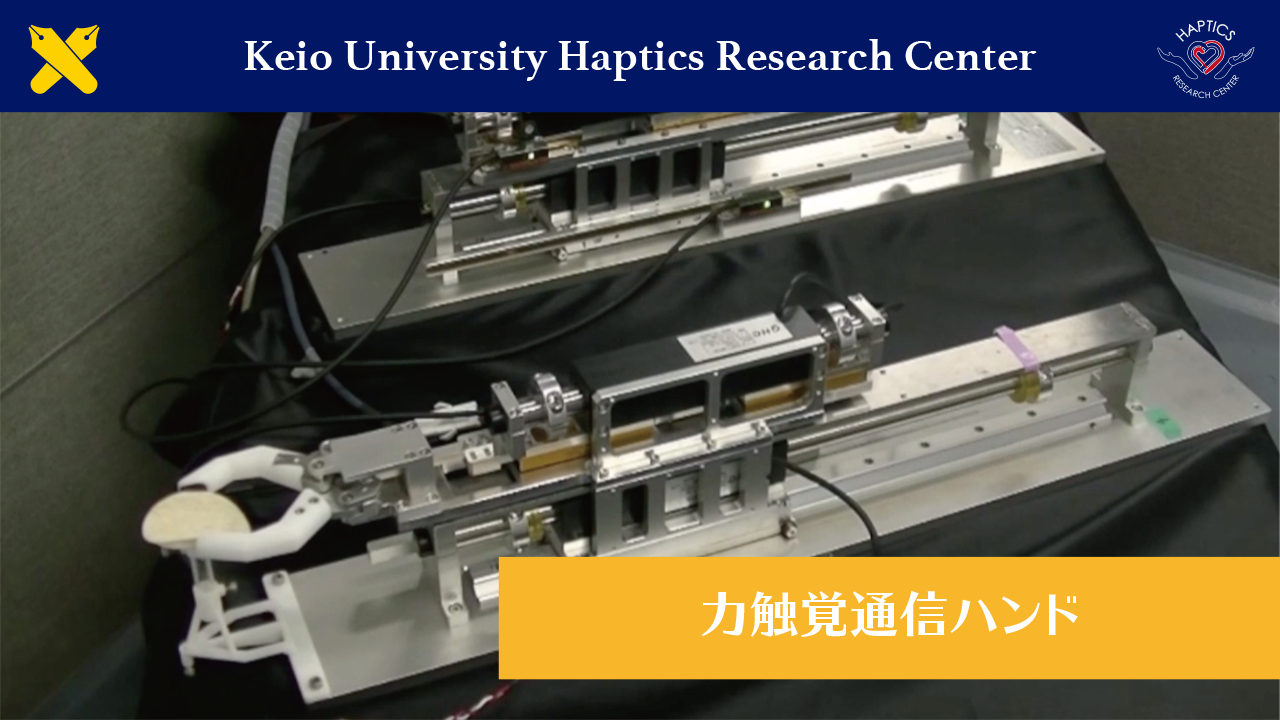
慶應義塾大学ハプティクス研究センター 力触覚ハンドマスタ・スレーブ型ロボットハンドを遠隔から操作してポテトチップスの把持感覚を手元に感じることで上手に掴むことができます。逆にリアルハプティクス技術が無く視覚情報のみの場合は力加減がわからず思わず割ることが多くなります。力触覚技術の応用で、人と柔軟に協調するロボットを実現しました。
-

シブヤ精機株式会社/慶應義塾大学 インテリジェント・ロボットハンドリアルハプティクス技術を応用した最新のロボットハンドと、AI(人工知能)技術を応用した3Dマシンビジョンを組み合わせた「ロボット選別システム」など、青果物を柔軟に優しく自動でハンドリングする数々の選別運搬装置を開発しました。
-

大林組/慶應義塾大学 油圧駆動建設重機へのリアルハプティクス技術応用リアルハプティクス技術を建設工事などの油圧駆動機械に用いることで、操作者が触覚・反力を感じることにより、繊細かつ安全に作業を進めることが可能になります。駆動側と操作側の「力の倍率」「距離の倍率」は任意に設定可能であり、操作側の小さな力でも駆動側は何倍もの力で大きく稼働することができます。
-
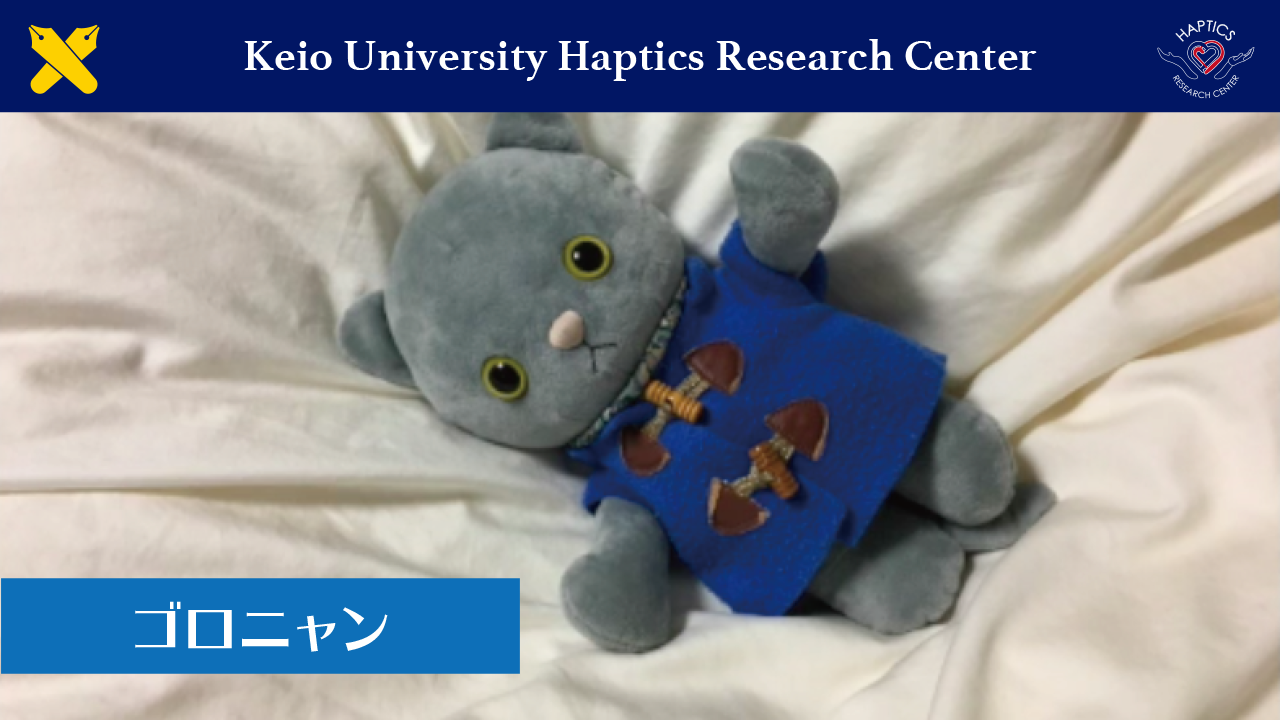
合同会社エープラスエー / 慶應義塾大学 ゴロニャンゴロニャンは、遠隔から非接触で人と人とのスキンシップによるコミュニケーションを可能とするPetAvatarで、遠く離れた人と人との絆を維持し、一体感を共有し心の安定に寄与します。猫型ぬいぐるみにリアルハプティクス技術による力触覚伝送を実装したロボットを組み込んだPetAvatarです。
パネル展示

慶應義塾大学ハプティクス研究センター紹介動画
慶應義塾大学ハプティクス研究センター